Nested monadic loops may cause space leaks
Published on
Consider the following trivial Haskell program:
main :: IO ()
main = worker
{-# NOINLINE worker #-}
worker :: (Monad m) => m ()
worker =
let loop = poll >> loop
in loop
poll :: (Monad m) => m a
poll = return () >> pollIt doesn’t do much — except, as it turns out, eat a lot of memory!
% ./test +RTS -s & sleep 1s && kill -SIGINT %1
751,551,192 bytes allocated in the heap
1,359,059,768 bytes copied during GC
450,901,152 bytes maximum residency (11 sample(s))
7,166,816 bytes maximum slop
888 MB total memory in use (0 MB lost due to fragmentation)
Tot time (elapsed) Avg pause Max pause
Gen 0 1429 colls, 0 par 0.265s 0.265s 0.0002s 0.0005s
Gen 1 11 colls, 0 par 0.701s 0.703s 0.0639s 0.3266s
INIT time 0.000s ( 0.000s elapsed)
MUT time 0.218s ( 0.218s elapsed)
GC time 0.966s ( 0.968s elapsed)
EXIT time 0.036s ( 0.036s elapsed)
Total time 1.223s ( 1.222s elapsed)
%GC time 79.0% (79.2% elapsed)
Alloc rate 3,450,267,071 bytes per MUT second
Productivity 21.0% of total user, 21.0% of total elapsedThese nested loops happen often in server-side programming. About a year ago, when I worked for Signal Vine, this happened to my code: the inner loop was a big streaming computation; the outer loop was something that would restart the inner loop should it fail.
Later that year, Edsko de Vries blogged about a very similar issue.
Recently, Sean Clark Hess observed something similar. In his case, the inner loop waits for a particular AMQP message, and the outer loop calls the inner loop repeatedly to extract all such messages.
So why would such an innocent-looking piece of code consume unbounded amounts of memory? To find out, let’s trace the program execution on the STG level.
Background: STG and IO
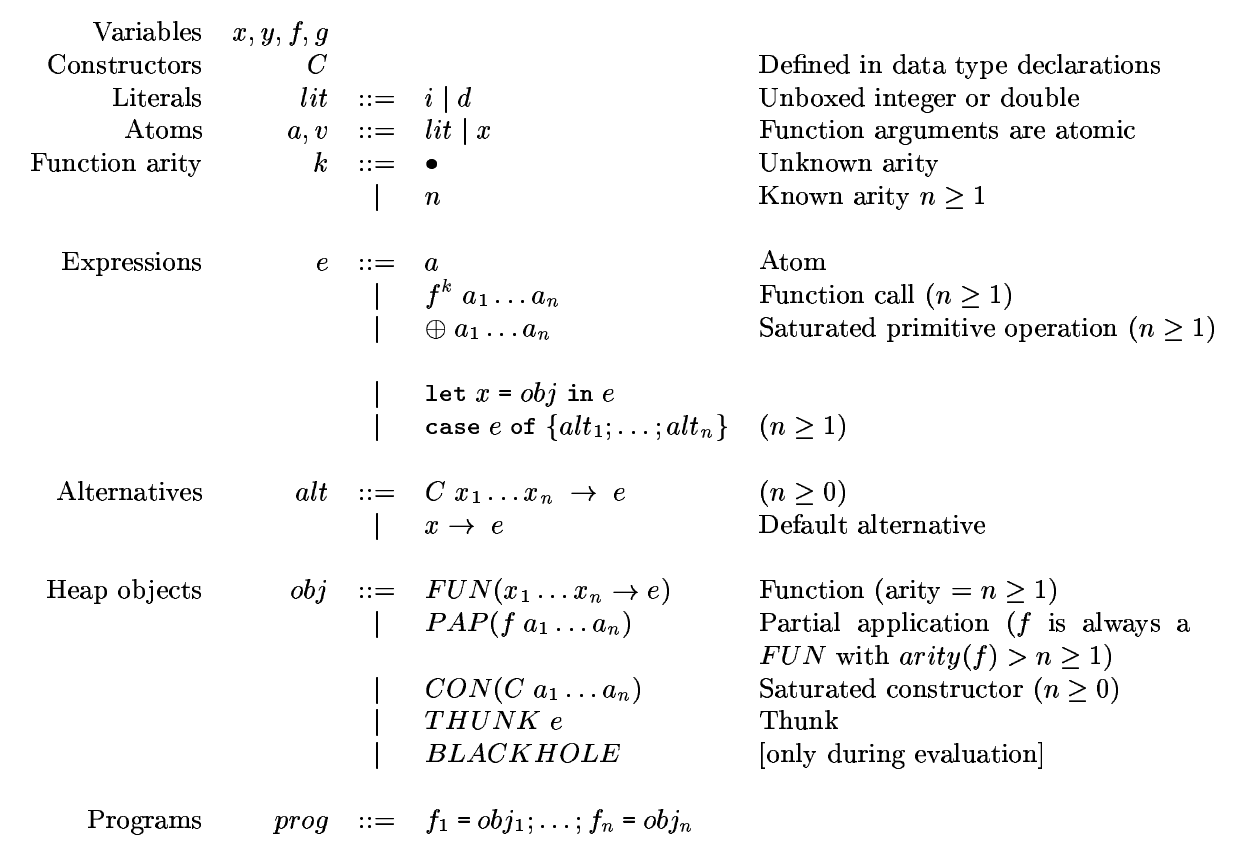
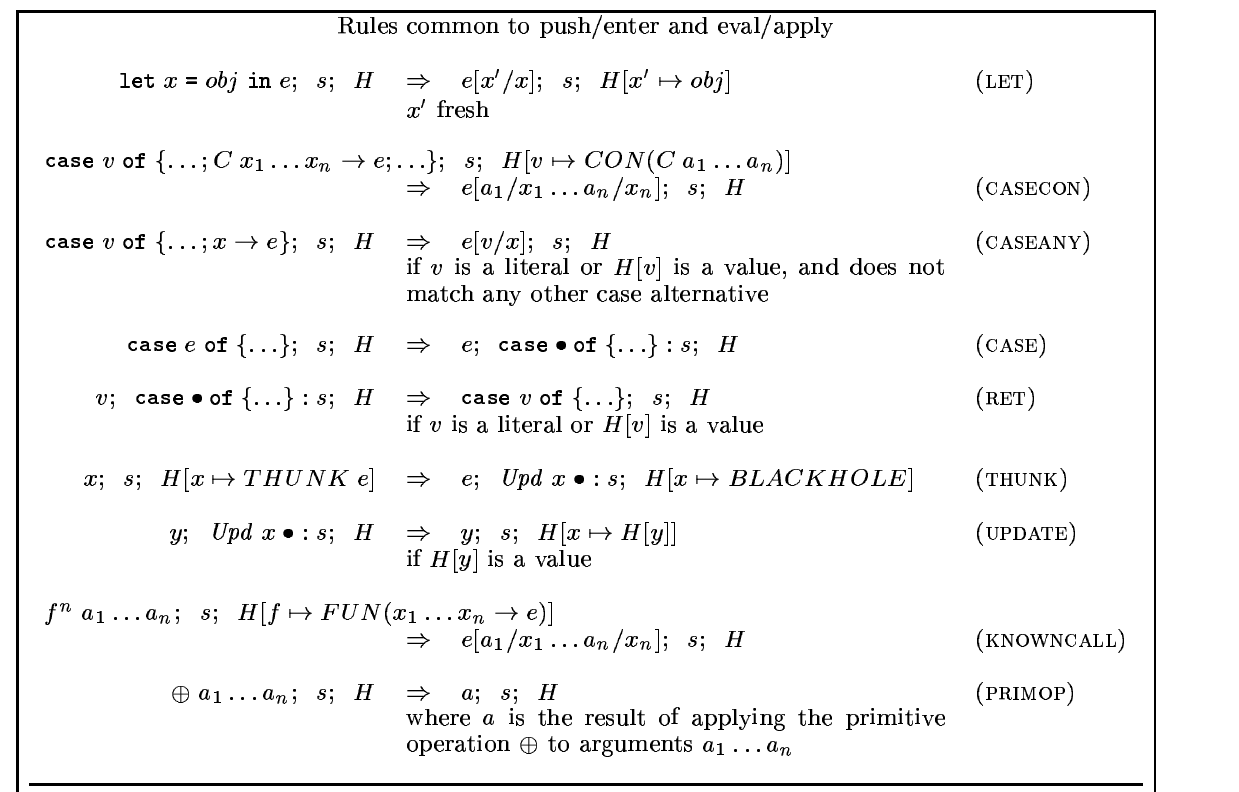
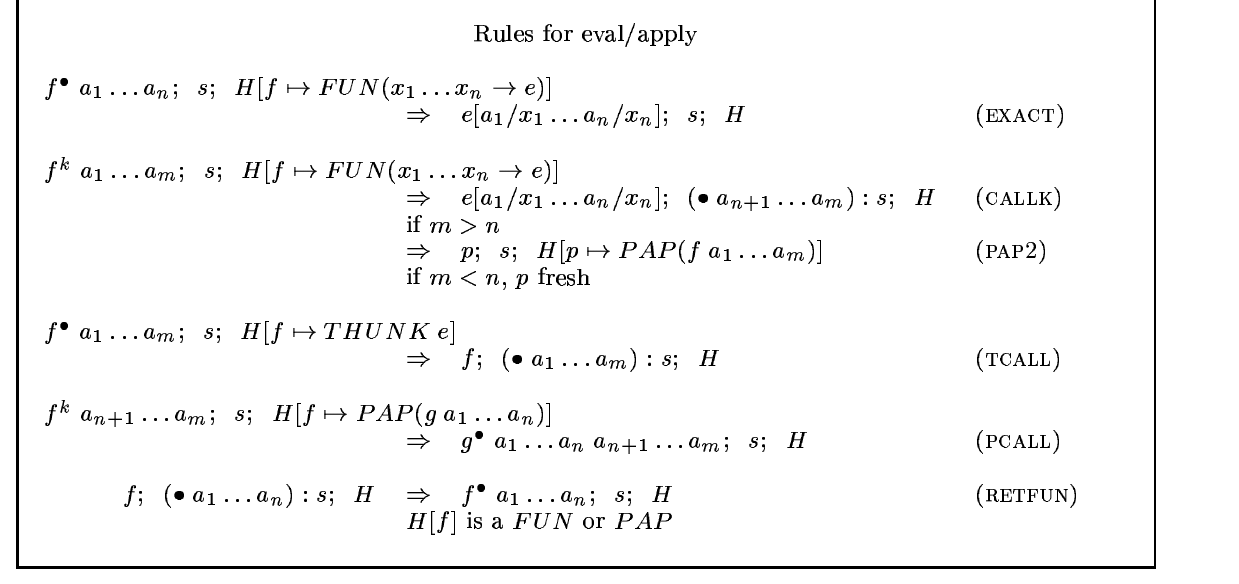
The runtime model of ghc-compiled programs is described in the paper Making a Fast Curry: Push/Enter vs. Eval/Apply for Higher-order Languages. Here is the grammar and the reduction rules for the quick reference.
It is going to be important that the IO type in GHC is a
function type:
newtype IO a = IO (State# RealWorld -> (# State# RealWorld, a #))Here are a few good introductions to the internals of
IO: from Edsko
de Vries, Edward
Z. Yang, and Michael
Snoyman.
Our program in STG
Let’s see now how our program translates to STG. This is a
translation done by ghc 8.0.1 with
-O -ddump-stg -dsuppress-all:
poll_rnN =
sat-only \r srt:SRT:[] [$dMonad_s312]
let { sat_s314 = \u srt:SRT:[] [] poll_rnN $dMonad_s312; } in
let { sat_s313 = \u srt:SRT:[] [] return $dMonad_s312 ();
} in >> $dMonad_s312 sat_s313 sat_s314;
worker =
\r srt:SRT:[] [$dMonad_s315]
let {
loop_s316 =
\u srt:SRT:[] []
let { sat_s317 = \u srt:SRT:[] [] poll_rnN $dMonad_s315;
} in >> $dMonad_s315 sat_s317 loop_s316;
} in loop_s316;
main = \u srt:SRT:[r2 :-> $fMonadIO] [] worker $fMonadIO;This is the STG as understood by ghc itself. In the notation of the fast curry paper introduced above, this (roughly) translates to:
main = THUNK(worker monadIO realWorld);
worker = FUN(monad ->
let {
loop = THUNK(let {worker_poll_thunk = THUNK(poll monad);}
in then monad worker_poll_thunk loop);
} in loop
);
poll = FUN(monad ->
let {
ret_thunk = THUNK(return monad unit);
poll_poll_thunk = THUNK(poll monad);
}
in then monad ret_thunk poll_poll_thunk
);monadIO is the record (“dictionary”) that contains the
Monad methods >>=, >>, and
return for the IO type. We will need return
and >> (called then here) in particular;
here is how they are defined:
returnIO = FUN(x s -> (# s, x #));
thenIO = FUN(m k s ->
case m s of {
(# new_s, result #) -> k new_s
}
);
monadIO = CON(Monad returnIO thenIO);
return = FUN(monad ->
case monad of {
Monad return then -> return
}
);
then = FUN(monad ->
case monad of {
Monad return then -> then
}
);STG interpreters
We could run our STG program by hand following the reduction rules listed above. If you have never done it, I highly recommend performing several reductions by hand as an exercise. But it is a bit tedious and error-prone. That’s why we will use Bernie Pope’s Ministg interpreter. My fork of Ministg adds support for unboxed tuples and recursive let bindings necessary to run our program.
There is another STG interpreter, stgi, by David Luposchainsky. It is more recent and looks nicer, but it doesn’t support the eval/apply execution model used by ghc, which is a deal breaker for our purposes.
We run Ministg like this:
ministg --noprelude --trace --maxsteps=100 --style=EA --tracedir leak.trace leak.stgMinistg will print an error message saying that the program hasn’t
finished running in 100 steps — as we would expect, — and it will also
generate a directory leak.trace containing html files. Each
html file shows the state of the STG machine after a single evaluation
step. You can browse these files here.
Tracing the program
Steps 0
through 16
take us from main to poll monadIO, which is
where things get interesting, because from this point on, only code
inside poll will be executing. Remember, poll
is an infinite loop, so it won’t give a chance for worker
to run ever again.
Each iteration of the poll loop consists of two phases.
During the first phase, poll monadIO is evaluated. This is
the “pure” part. No IO gets done during this part; we are just figuring
out what is going to be executed. The first phase runs up until
step
24.
On step
25, we grab the RealWorld token from the stack, and the second phase
— the IO phase — begins. It ends on step
42, when the next iteration of the loop begins with
poll monadIO.
Let’s look at the first phase in more detail. In steps 18 and 19, the let-expression
let {
ret_thunk = THUNK(return monad unit);
poll_poll_thunk = THUNK(poll monad);
}
in then monad ret_thunk poll_poll_thunkis evaluated. The thunks ret_thunk and
poll_poll_thunk are allocated on the heap at addresses
$3 and $4, respectively.
Later these thunks will be evaluated/updated to partial applications:
$3=PAP(returnIO unit) on step
35 and $4=PAP(thenIO $7 $8) on step
50.
We would hope that these partial applications will eventually be
garbage-collected. Unfortunately, not. The partial application
$1=PAP(thenIO $3 $4) is defined in terms of $3
and $4. $1 is the
worker_poll_thunk, the “next” instance of the
poll loop invoked by worker.
This is why the leak doesn’t occur if there’s no outer loop. Nothing
would reference $3 and $4, and they would be
executed and gc’d.
IO that doesn’t leak
The memory leak is a combination of two reasons. As we discussed above, the first reason is the outer loop that holds on to the reference to the inner loop.
The second reason is that IO happens here in two phases: the pure phase, during which we “compute” the IO action, and the second phase, during which we run the computed action. If there was no first phase, there would be nothing to remember.
Consider this version of the nested loop. Here, I moved NOINLINE to poll. (NOINLINE is needed because otherwise ghc would realize that our program doesn’t do anything and would simplify it down to a single infinite loop.)
main :: IO ()
main = worker
worker :: (Monad m) => m ()
worker =
let loop = poll >> loop
in loop
{-# NOINLINE poll #-}
poll :: (Monad m) => m a
poll = return () >> pollIn this version, ghc would inline worker into main and
specialize it to IO. Here is the ghc’s STG code:
poll_rqk =
sat-only \r srt:SRT:[] [$dMonad_s322]
let { sat_s324 = \u srt:SRT:[] [] poll_rqk $dMonad_s322; } in
let { sat_s323 = \u srt:SRT:[] [] return $dMonad_s322 ();
} in >> $dMonad_s322 sat_s323 sat_s324;
main1 =
\r srt:SRT:[r3 :-> main1, r54 :-> $fMonadIO] [s_s325]
case poll_rqk $fMonadIO s_s325 of _ {
(#,#) ipv_s327 _ -> main1 ipv_s327;
};Here, poll still runs in two phases, but
main1 (the outer loop) doesn’t. This program still
allocates memory and runs not as efficient as it could, but at least it
runs in constant memory. This is because the compiler realizes that
poll_rqk $fMonadIO is not computing anything useful and
there’s no point in caching that value. (I am actually curious what
exactly ghc’s logic is here.)
What if we push NOINLINE even further down?
main :: IO ()
main = worker
worker :: (Monad m) => m ()
worker =
let loop = poll >> loop
in loop
poll :: (Monad m) => m a
poll = do_stuff >> poll
{-# NOINLINE do_stuff #-}
do_stuff :: Monad m => m ()
do_stuff = return ()STG:
do_stuff_rql =
sat-only \r srt:SRT:[] [$dMonad_s32i] return $dMonad_s32i ();
$spoll_r2SR =
sat-only \r srt:SRT:[r54 :-> $fMonadIO,
r2SR :-> $spoll_r2SR] [s_s32j]
case do_stuff_rql $fMonadIO s_s32j of _ {
(#,#) ipv_s32l _ -> $spoll_r2SR ipv_s32l;
};
main1 =
\r srt:SRT:[r3 :-> main1, r2SR :-> $spoll_r2SR] [s_s32n]
case $spoll_r2SR s_s32n of _ {
(#,#) ipv_s32p _ -> main1 ipv_s32p;
};This code runs very efficiently, in a single phase, and doesn’t allocate at all.
Of course, in practice we wouldn’t deliberately put these NOINLINEs in our code just to make it inefficient. Instead, the inlining or specialization will fail to happen because the function is too big and/or resides in a different module, or for some other reason.
Arities
Arities provide an important perspective on the two-phase computation
issue. The arity of then is 1: it is just a record
selector. The arity of thenIO is 3: it takes the two
monadic values and the RealWorld state token.
Arities influence what happens at runtime, as can be seen from the
STG reduction rules. Because thenIO has arity 3, a partial
application is created for
thenIO ret_thunk poll_poll_thunk. Let’s change the arity of
thenIO to 2, so that no PAPs get created:
thenIO = FUN(m k ->
case m realWorld of {
(# new_s, result #) -> k
}
);(this is similar to how unsafePerformIO works). Now we
no longer have PAPs, but our heap is filled with the same exact number
of BLACKHOLEs.
More importantly, arities also influence what happens during compile
time: what shape the generated STG code has. Because then
has arity 1, ghc decides to create a chain of thens before
passing the RealWorld token. Let’s change (“eta-expand”) the
poll code as if then had arity 4,
without actually changing then or thenIO or
their runtime arities:
# added a dummy argument s
poll = FUN(monad s ->
let {
ret_thunk = THUNK(return monad unit);
poll_poll_thunk = THUNK(poll monad);
}
in then monad ret_thunk poll_poll_thunk s
);
# no change in then or thenIO
then = FUN(monad ->
case monad of {
Monad return then -> then
}
);
thenIO = FUN(m k s ->
case m s of {
(# new_s, result #) -> k new_s
}
);This code now runs in constant memory!
Therefore, what inlining/specialization does is that it lets the
compiler to see the true arity of a function such as
then. (Of course, it would also allow the compiler to
replace then with thenIO.)
Conclusions
Let me tell you how you can avoid any such space leaks in your code by following a simple rule:
I don’t know.
In some cases, -fno-full-laziness
or -fno-state-hack help. In this case, they don’t.
In 2012, I wrote why reasoning about space usage in Haskell is hard. I don’t think anything has changed since then. It is a hard problem to solve. I filed a ghc bug #13080 just in case the ghc developers might figure out a way how to address this particular issue.
Most of the time everything works great, but once in a while you stumble upon something like this. Such is life.
Thanks to Reid Barton for pointing out that my original theory regarding this leak was incomplete at best.